ZLTECH 3-Phas 60 mm Nema24 24V 100W/200W/300W/400W 3000RPM BLDC Motor fir Dréckmaschinn








E Brushless DC Elektromotor (BLDC) ass en Elektromotor ugedriwwen duerch eng Direktstroum Spannungsversuergung an elektronesch kommutéiert amplaz vu Pinselen wéi a konventionell DC Motoren.BLDC Motore si méi populär wéi déi konventionell DC Motoren hautdesdaags, awer d'Entwécklung vun dëser Aart vu Motore war nëmme méiglech zënter den 1960er, wéi d'Halbleiterelektronik entwéckelt gouf.
Ähnlechkeeten BLDC an DC Motore
Béid Aarte vu Motore besteet aus engem Stator mat permanente Magnéiten oder elektromagnetesche Spule op der Äussewelt an engem Rotor mat Spulewindungen, dee vu bannen duerch Gläichstroum ugedriwwe ka ginn.Wann de Motor duerch Gläichstroum ugedriwwe gëtt, gëtt e Magnéitfeld am Stator erstallt, entweder d'Magnete am Rotor unzitt oder ofstouss.Dëst bewierkt datt den Rotor fänkt un ze dréinen.
E Kommutator ass gebraucht fir den Rotor rotéierend ze halen, well de Rotor géif stoppen wann en an der Linn mat de magnetesche Kräften am Stator ass.De Kommutator schalt kontinuéierlech den DC Stroum duerch d'Wicklungen, a schalt domat och d'Magnéitfeld.Op dës Manéier kann de Rotor weider rotéieren soulaang de Motor ugedriwwe gëtt.
Differenzen BLDC an DC Motore
De prominentsten Ënnerscheed tëscht engem BLDC Motor an engem konventionellen DC Motor ass d'Aart vu Kommutator.En DC Motor benotzt Kuelebürsten fir dësen Zweck.En Nodeel vun dëse Pinselen ass datt se séier trauen.Dofir benotzen BLDC Motore Sensoren - normalerweis Hall Sensoren - fir d'Positioun vum Rotor an e Circuit Board ze moossen, deen als Schalter funktionnéiert.D'Inputmiessunge vun de Sensoren ginn vum Circuitboard veraarbecht, deen et präzis de richtege Moment Zäit fir ze kommutéieren wéi de Rotor dréit.
Parameteren
| Artikel | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| Phase | 3 Phase | 3 Phase | 3 Phase | 3 Phase |
| Gréisst | Nema 24 | Nema 24 | Nema 24 | Nema 24 |
| Spannung (V) | 24 | 24 | 48 | 48 |
| Bewäert Kraaft (W) | 100 | 200 | 300 | 400 |
| Bewäert Stroum (A) | 5.5 | 11.5 | 8.3 | 12 |
| Peak Stroum (A) | 16.5 | 34,5 | 25 | 36 |
| Bewäert Dréimoment (Nm) | 0,32 | 0,63 | 0,96 | 1.28 |
| Spëtzmoment (Nm) | 1 | 1.9 | 3 | 3,84 |
| Bewäert Geschwindegkeet (RPM) | 3000 | 3000 | 3000 | 3000 |
| Zuel vu Pole (Pairen) | 4 | 4 | 4 | 4 |
| Resistenz (Ω) | 0,22±10% | 0,59±10% | 0,24±10% | |
| Induktioun (mH) | 0,29±20% | 0,73±20% | 0,35±20% | |
| Ke (RMS)(V/RPM) | 4,2x10-3 | 4,2x10-3 | 8,3x10-3 | 8,5x10-3 |
| Rotor Inertia (kg.cm²) | 0,24 | 0,48 | 0,72 | 0,96 |
| Dréimoment Koeffizient (Nm/A) | 0,06 | 0,06 | 0,09 | 0.12 |
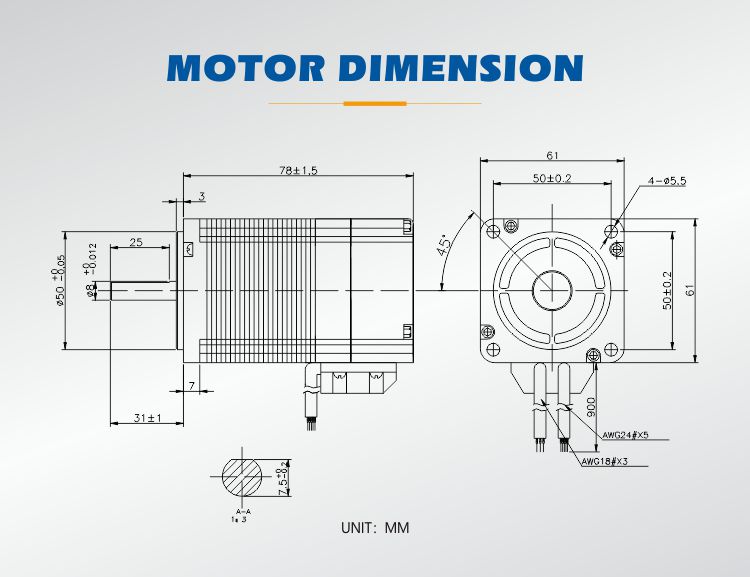
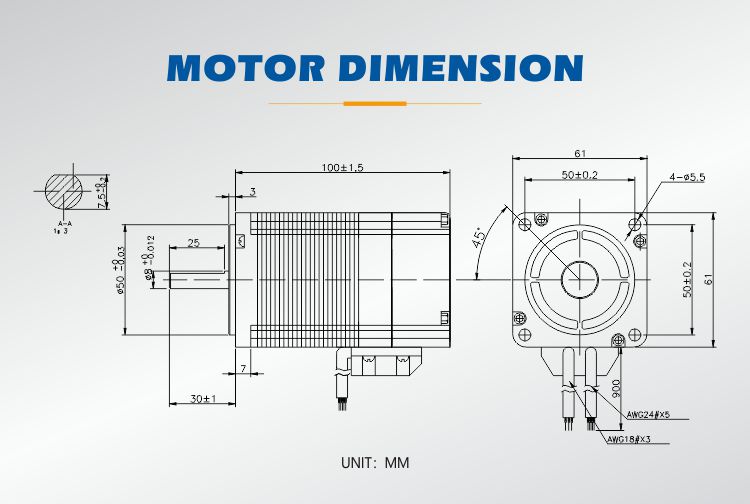
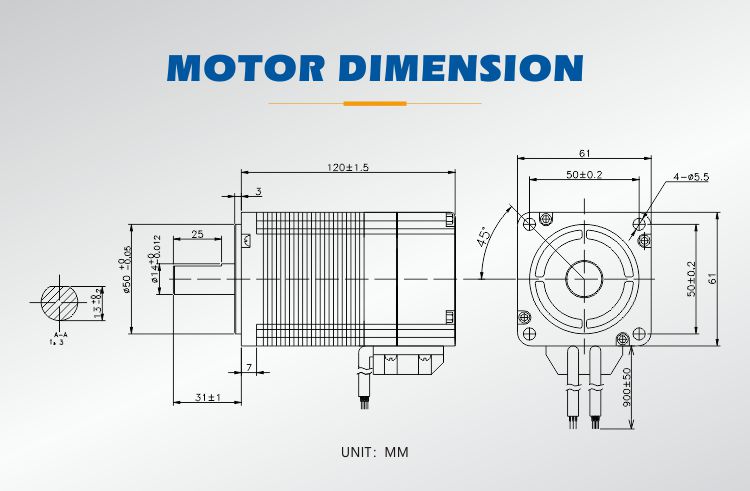
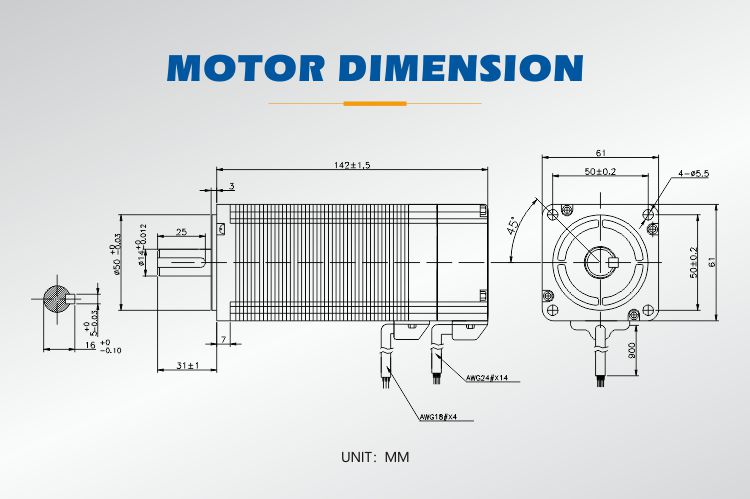
| Schaft Duerchmiesser (mm) | 8 | 8 | 14 | 14 |
| Schaftlängt (mm) | 31 | 30 | 31 | 31 |
| Motor Längt (mm) | 78 | 100 | 120 | 142 |
| Gewiicht (kg) | 0,85 | 1.25 | 1.5 | 2.05 |
| Adaptéiert BLDC Driver | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
Dimensioun
Applikatioun

Verpakung

Produktioun & Inspektioun Apparat

Qualifikatioun & Zertifizéierung

Büro & Fabréck

Zesummenaarbecht

Produit Kategorien
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A Stepper Step...
-
M4040 ZLTECH 2 Phase 12V-40V DC 0.5A-4.0A Pinsel...
-

ZLTECH Nema17 0.5/0.7 Nm 18V-36V integréiert Schrëtt ...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 24V-36V 5A DC elektresch Modbus RS485 ...
-

ZLTECH 57mm Nema23 24VDC 1000-wrie closed loop ...





